P Verankerung Industrieroboter 2013: Unterschied zwischen den Versionen
Zur Navigation springen
Zur Suche springen
Lutz (Diskussion | Beiträge) (Die Seite wurde neu angelegt: „== Projektbeschreibung == Der AG wollte nur die Verankerungen für die Arbeitsplattform eines Industrieroboters nachgewiesen bekommen. In der Vergangenheit sin…“) |
Lutz (Diskussion | Beiträge) K (Schützte „P Verankerung Industrieroboter 2013“ ([Bearbeiten=Nur Administratoren erlauben] (unbeschränkt) [Verschieben=Nur Administratoren erlauben] (unbeschränkt))) |
||
| (Eine dazwischenliegende Version desselben Benutzers wird nicht angezeigt) | |||
| Zeile 8: | Zeile 8: | ||
== Grafiken == | == Grafiken == | ||
<gallery widths="260" heights="195" perrow="2"> | <gallery widths="260" heights="195" perrow="2"> | ||
ind_2013_1.jpg|System | |||
ind_2013_2.jpg|Ankernachweis | |||
</gallery> | </gallery> | ||
<!-- Kategorien --> | <!-- Kategorien --> | ||
Aktuelle Version vom 19. November 2019, 16:57 Uhr
Projektbeschreibung
Der AG wollte nur die Verankerungen für die Arbeitsplattform eines Industrieroboters nachgewiesen bekommen. In der Vergangenheit sind die Anker immer wieder herausgerissen wurden. Nun, da habe ich ganz pingelig versucht, die Kräfte und Momente zusammenzutragen. Dabei stellte sich heraus, dass der verantwortliche Projektleiter mit meinen Fachbegriffen nichts anfangen konnte...hier hilft nur Geduld. 😥 Abschließend habe ich die Extremwerte ermittelt und die Anker nachgewiesen. Mein ☎ hat seit dem nicht geklingelt. 😊
Projektnummer
8-2013
Schlagwörter
Industrieroboter
Grafiken
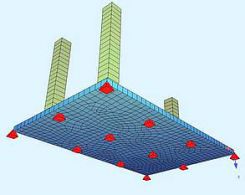
System
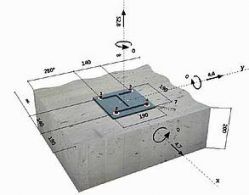
Ankernachweis

